




![]()
- Aktuelle Seite:
- Start

- Schuleinblicke
- Arbeitsgemeinschaften
- Wir bauen einen Baseball-Roboter
Neue Artikel
Arbeitsgemeinschaften
Wir bauen einen Baseball-Roboter
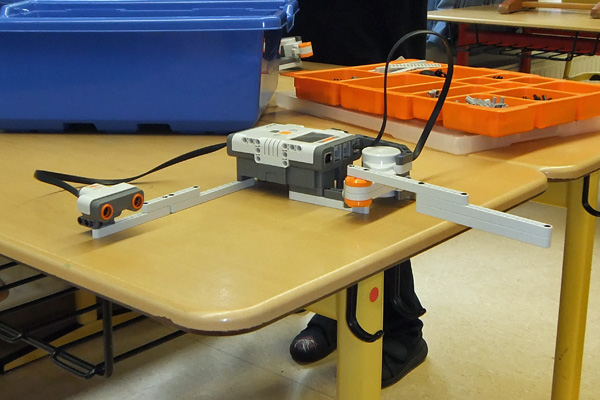
In der 2.AG Stunde haben wir einen Roboter gebaut, der eigenständig nach einem Ball schlagen kann. Dafür benutzen wir einen Ultraschallsensor, der Objekte in seiner Nähe wahrnehmen kann.
Nachdem der Roboter funktionierte, haben die Schüler noch ein paar Änderungen am Programm vorgenommen: z.B. Geräusche eingefügt, die Displayanzeige umgeändert und den Sensor gehen einen Berührungssensor ausgetauscht.

In der kommenden AG Stunde wollen wir dann erstmals einen fahrenden Mini-Roboter bauen und per Fernbedienung steuern.